 Matlab
Matlab Simulink
Simulink NS3
NS3 OMNET++
OMNET++ COOJA
COOJA CONTIKI OS
CONTIKI OS NS2
NS2
DC/DC Buck Power Converter on a Hierarchical Control
In this paper a smooth starter, based on a dc/dc Buck power converter, for the angular velocity trajectory tracking task of a dc permanent magnet motor is presented. To this end, a hierarchical controller is designed, which is integrated by a control associated with the dc motor based on differential flatness at the high level, and a control related with the dc/dc Buck converter based on a cascade control scheme at the low level. The control at the high level allows the dc motor angular velocity to track a desired trajectory and also provides the desired voltage profile that must be tracked by the output voltage of the dc/dc Buck power converter.
In order to assure the latter, a cascade control at the low level is designed, considering a sliding mode control for the inner current loop and a proportional-integral control for the outer voltage loop. The hierarchical controller is tested through experiments using MATLAB-Simulink and the DS1104 board from dSPACE. The obtained results show that the desired angular velocity trajectory is well tracked under abrupt variations in the system parameters and that the controller is robust in such operation conditions, confirming the validity of the proposed controller.
Related Simulink Project Titles:
- Modelling and analysis of modular multilevel converter for solar photovoltaic applications to improve power quality.
- Characteristic Investigation and Control of a Modular Multilevel Converter-Based HVDC System Under Single-Line-to-Ground Fault Conditions.
- Multi-Agent System for Distributed Management of Microgrids.
- Enhanced Phase-Shifted PWM Carrier Disposition for Interleaved Voltage-Source Inverters.
- Circuit-Oriented Treatment of Nonlinear Capacitances in Switched-Mode Power Supplies.
- PFC Cuk Converter-Fed BLDC Motor Drive.
- A Study of the Impact of Delay Mismatch on Linearity of Outphasing Transmitters.
- A Real-Time Thermal Model for Monitoring of Power Semiconductor Devices.
- Virtual Damping Flux-Based LVRT Control for DFIG-Based Wind Turbine.
- Maximum Power Extraction From Series-Connected Fuel Cell Stacks by the Current Compensation Technique.
- Compact Electro-Thermal Reliability Modelling and Experimental Characterisation of Bipolar Latch-up in SiC and CoolMOS Power MOSFETs.
Subscribe Our Youtube Channel
You can Watch all Subjects Matlab & Simulink latest Innovative Project Results

Our services
We want to support Uncompromise Matlab service for all your Requirements Our Reseachers and Technical team keep update the technology for all subjects ,We assure We Meet out Your Needs.
Our Services
- Matlab Research Paper Help
- Matlab assignment help
- Matlab Project Help
- Matlab Homework Help
- Simulink assignment help
- Simulink Project Help
- Simulink Homework Help
- Matlab Research Paper Help
- NS3 Research Paper Help
- Omnet++ Research Paper Help
Our Benefits
- Customised Matlab Assignments
- Global Assignment Knowledge
- Best Assignment Writers
- Certified Matlab Trainers
- Experienced Matlab Developers
- Over 400k+ Satisfied Students
- Ontime support
- Best Price Guarantee
- Plagiarism Free Work
- Correct Citations
Expert Matlab services just 1-click

Delivery Materials
Unlimited support we offer you
For better understanding purpose we provide following Materials for all Kind of Research & Assignment & Homework service.
 Programs
Programs Designs
Designs Simulations
Simulations Results
Results Graphs
Graphs Result snapshot
Result snapshot Video Tutorial
Video Tutorial Instructions Profile
Instructions Profile  Sofware Install Guide
Sofware Install Guide Execution Guidance
Execution Guidance  Explanations
Explanations Implement Plan
Implement Plan
Matlab Projects
Matlab projects innovators has laid our steps in all dimension related to math works.Our concern support matlab projects for more than 10 years.Many Research scholars are benefited by our matlab projects service.We are trusted institution who supplies matlab projects for many universities and colleges.
Reasons to choose Matlab Projects .org???
Our Service are widely utilized by Research centers.More than 5000+ Projects & Thesis has been provided by us to Students & Research Scholars. All current mathworks software versions are being updated by us.
Our concern has provided the required solution for all the above mention technical problems required by clients with best Customer Support.
- Novel Idea
- Ontime Delivery
- Best Prices
- Unique Work
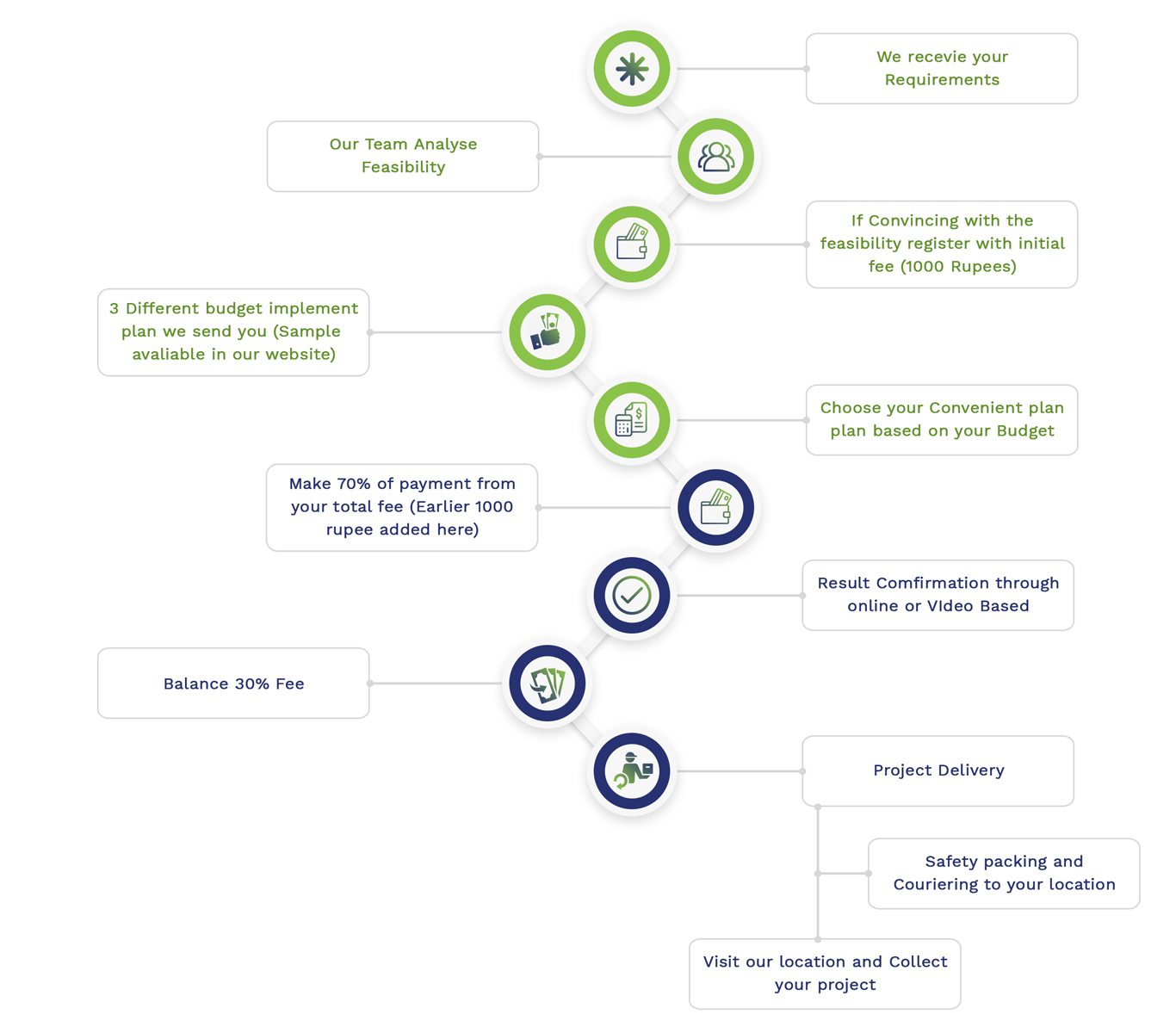
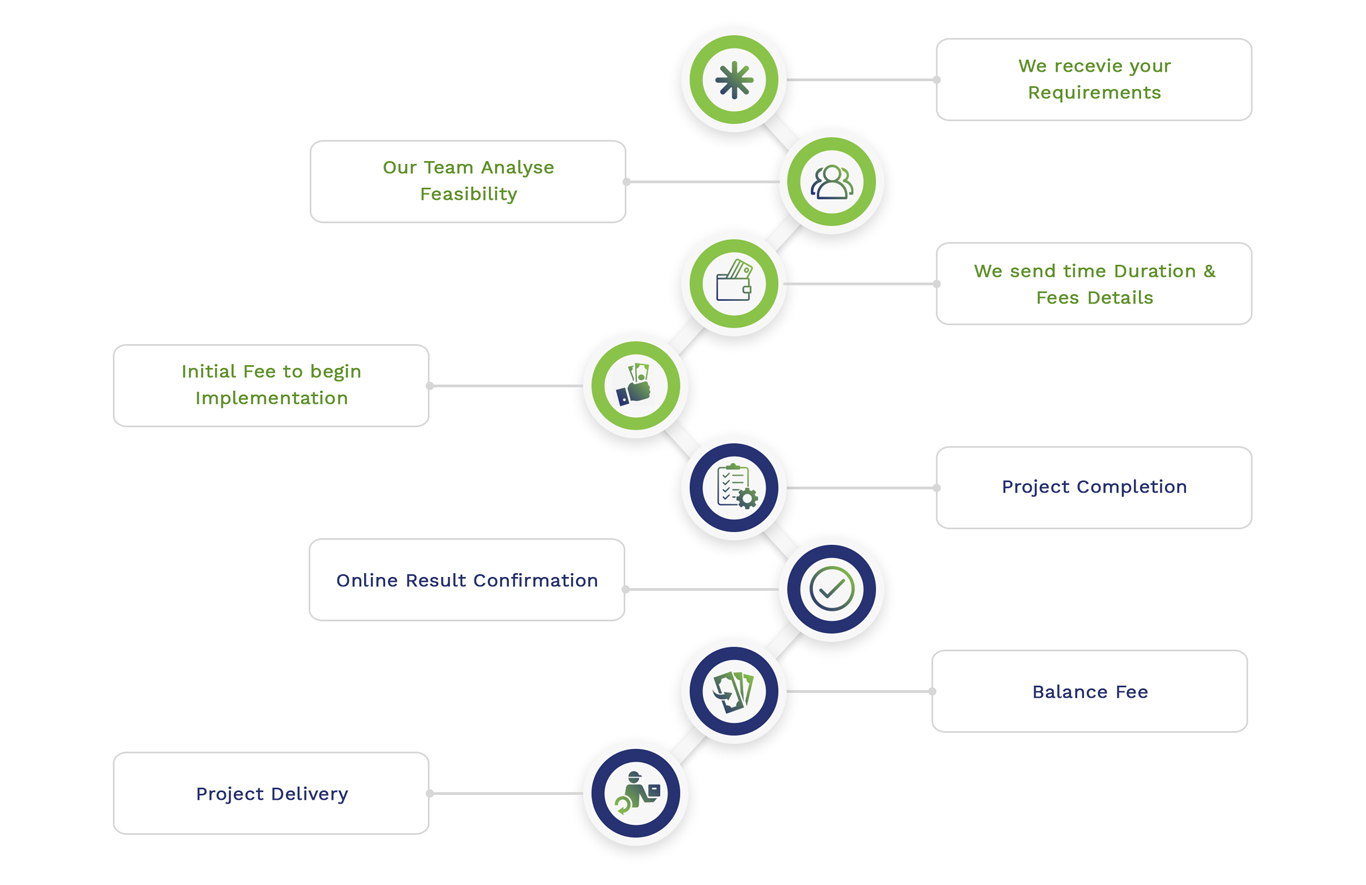
Simulation Projects Workflow
Embedded Projects Workflow