 Matlab
Matlab Simulink
Simulink NS3
NS3 OMNET++
OMNET++ COOJA
COOJA CONTIKI OS
CONTIKI OS NS2
NS2
Smooth Tracking with Capacitive Touch Panels
This work presents a novel 7-inch capacitive touch panel (CTP) system with a smooth tracking algorithm that accurately estimates the position where the panel is touched and tracks the trajectory of touch. The proposed CTP system consists of a micro-controller unit, sensor IC, and interface board. When a user draws at different speeds, the measurement noise caused by the sensor IC induces an error in the touched position and zigzag trajectory, especially when the motion is slow.
The fuzzy logic-based adaptive strong tracking Kalman filter (FLASTKF) method is implemented in a CTP system to mitigate the effect of measurement noise and provide a smooth tracking trajectory at different speeds. Moreover, the approach effectively measures and quantifies the “smoothness” of the touched trajectory. Experimental results indicate that the proposed method reduces the measurement noise and decreases the mean tracking error by 85.4% over that achieved using the moving average filter (MAF).
Related Fuzzy Logic Projects:
- A Fuzzy Logic Based Retrofit System for Enabling Smart Energy Efficient Electric Cookers
- Fuzzy Logic for Adaptive Instruction in an E-learning Environment for Computer Programming
- Smart Cloud Storage Service Selection Based on Fuzzy Logic, Theory of Evidence and Game Theory
- Intelligent Fashion Recommender System: Fuzzy Logic in Personalized Garment Design
- A Local Statistical Fuzzy Active Contour Model for Change Detection
- Accurate Bolt Tightening Using Model-Free Fuzzy Control for Wind Turbine Hub Bearing Assembly
- An Improved Spiral Dynamic Optimization Algorithm With Engineering Application
- Observed-Based Adaptive Fuzzy Tracking Control for Switched Nonlinear Systems With Dead-Zone
- Discovering Regions Where Users Drive Inefficiently on Regular Journeys
- Advanced Pitch Angle Control Based on Fuzzy Logic for Variable-Speed Wind Turbine Systems
- Employing Type-2 Fuzzy Logic Systems in the Efforts to Realize Ambient Intelligent Environments [Application Notes]
- A Fuzzy Logic Controller for Autonomous Operation of a Voltage Source Converter-Based Distributed Generation System
- Fuzzy-Logic-Based Terrain Identification with Multisensor Fusion for Transtibial Amputees
- Towards Agrobots: Trajectory Control of an Autonomous Tractor Using Type-2 Fuzzy Logic Controllers
Subscribe Our Youtube Channel
You can Watch all Subjects Matlab & Simulink latest Innovative Project Results

Our services
We want to support Uncompromise Matlab service for all your Requirements Our Reseachers and Technical team keep update the technology for all subjects ,We assure We Meet out Your Needs.
Our Services
- Matlab Research Paper Help
- Matlab assignment help
- Matlab Project Help
- Matlab Homework Help
- Simulink assignment help
- Simulink Project Help
- Simulink Homework Help
- Matlab Research Paper Help
- NS3 Research Paper Help
- Omnet++ Research Paper Help
Our Benefits
- Customised Matlab Assignments
- Global Assignment Knowledge
- Best Assignment Writers
- Certified Matlab Trainers
- Experienced Matlab Developers
- Over 400k+ Satisfied Students
- Ontime support
- Best Price Guarantee
- Plagiarism Free Work
- Correct Citations
Expert Matlab services just 1-click

Delivery Materials
Unlimited support we offer you
For better understanding purpose we provide following Materials for all Kind of Research & Assignment & Homework service.
 Programs
Programs Designs
Designs Simulations
Simulations Results
Results Graphs
Graphs Result snapshot
Result snapshot Video Tutorial
Video Tutorial Instructions Profile
Instructions Profile  Sofware Install Guide
Sofware Install Guide Execution Guidance
Execution Guidance  Explanations
Explanations Implement Plan
Implement Plan
Matlab Projects
Matlab projects innovators has laid our steps in all dimension related to math works.Our concern support matlab projects for more than 10 years.Many Research scholars are benefited by our matlab projects service.We are trusted institution who supplies matlab projects for many universities and colleges.
Reasons to choose Matlab Projects .org???
Our Service are widely utilized by Research centers.More than 5000+ Projects & Thesis has been provided by us to Students & Research Scholars. All current mathworks software versions are being updated by us.
Our concern has provided the required solution for all the above mention technical problems required by clients with best Customer Support.
- Novel Idea
- Ontime Delivery
- Best Prices
- Unique Work
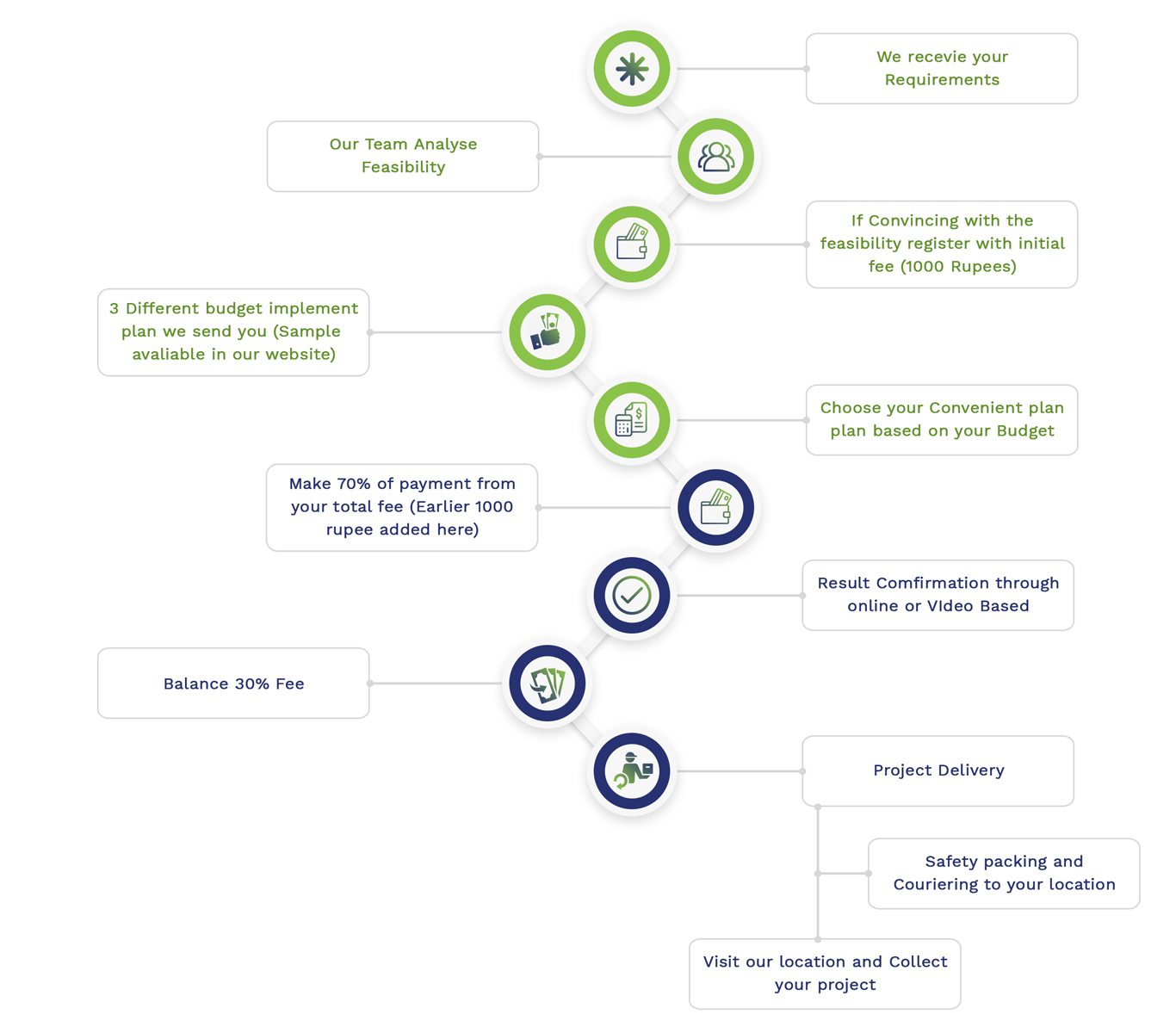
Simulation Projects Workflow
Embedded Projects Workflow