 Matlab
Matlab Simulink
Simulink NS3
NS3 OMNET++
OMNET++ COOJA
COOJA CONTIKI OS
CONTIKI OS NS2
NS2
Python Robot Arm Simulator are used specifically for educational and academic activities, developing a robot arm simulator with the application of Python could be considered as inspiring activities. Python Robot Arm Simulator ideas and project topics are shared by us so get the best results by working with our team. PyBullet is one of the prevalent libraries for simulating robotics in Python. For machine learning, games and robotics, this Python module is very suitable.
For developing a basic robot arm simulator with the aid of PyBullet, gradual procedures are discussed here:
Step 1: Install PyBullet
We have to install PyBullet initially. By utilizing pip, we can install this:
pip install pybullet
Step 2: Configure the Simulation Platform
A Python program need to be developed and the required modules are supposed to be loaded:
import pybullet as p
import time
import pybullet_data
Step 3: Set the Physics Simulator
It is required to set up the physics simulator and a programing platform must be configured:
# Connect to PyBullet
physicsClient = p.connect(p.GUI)
# Set the simulation parameters
p.setAdditionalSearchPath(pybullet_data.getDataPath())
p.setGravity(0, 0, -9.8)
# Load the plane and robot arm URDF models
planeId = p.loadURDF(“plane.urdf”)
robotId = p.loadURDF(“kuka_iiwa/model.urdf”, [0, 0, 0], useFixedBase=True)
Step 4: Regulate the Robot Arm
Develop joint positions or implement joint torques to regulate the robotic arm. We need to regulate the position of joints for convenience:
# Get the number of joints
num_joints = p.getNumJoints(robotId)
# Print joint information
for joint in range(num_joints):
info = p.getJointInfo(robotId, joint)
print(f”Joint {joint}: {info[1]}”)
# Set target positions for the joints
target_positions = [0, -1, 0, -1.5, 0, 1, 0]
# Run the simulation
for i in range(10000):
p.stepSimulation()
for joint in range(num_joints):
p.setJointMotorControl2(robotId, joint, p.POSITION_CONTROL, target_positions[joint])
time.sleep(1./240.)
Step 5: Disconnect the Simulation
Once we finished, disable the simulation at last:
# Disconnect from PyBullet
p.disconnect()
Entire Code
For a basic robot arm simulator, entire program is offered below:
import pybullet as p
import time
import pybullet_data
# Connect to PyBullet
physicsClient = p.connect(p.GUI)
# Set the simulation parameters
p.setAdditionalSearchPath(pybullet_data.getDataPath())
p.setGravity(0, 0, -9.8)
# Load the plane and robot arm URDF models
planeId = p.loadURDF(“plane.urdf”)
robotId = p.loadURDF(“kuka_iiwa/model.urdf”, [0, 0, 0], useFixedBase=True)
# Get the number of joints
num_joints = p.getNumJoints(robotId)
# Print joint information
for joint in range(num_joints):
info = p.getJointInfo(robotId, joint)
print(f”Joint {joint}: {info[1]}”)
# Set target positions for the joints
target_positions = [0, -1, 0, -1.5, 0, 1, 0]
# Run the simulation
for i in range(10000):
p.stepSimulation()
for joint in range(num_joints):
p.setJointMotorControl2(robotId, joint, p.POSITION_CONTROL, target_positions[joint])
time.sleep(1./240.)
# Disconnect from PyBullet
p.disconnect()
In Python, this simple instance clearly represents the measures for configuring a robot arm simulator with the application of PyBullet. For more enhanced simulations, we can include sensor synthesization, communication with the platform and complicated features by expanding this code.
Python robot arm simulator projects
To interpret simulation platforms, control systems and robotics, developing projects in accordance with robotic arm simulators by utilizing Python is examined as a beneficial approach. For examining with a robot arm simulator, some of the impactful project concepts are offered by us :
- Basic Movement Simulation
- Primary actions of the robotic arm like attaining various points in space need to be simulated.
- We have to be aware of path planning, joint control and inverse kinematics.
- Pick and Place Automation
- In which the robot arm selects an object from one place and positions it in another place, focus on simulating the pick-and-place function.
- Gripping mechanisms and object detections should be executed.
- Path Planning and Obstacle Avoidance
- To attain a goal, design a simulation in which a robotic arm should direct around the barriers.
- Path planning techniques such as A* and RRT (Rapidly-exploring Random Tree) are meant to be executed.
- Drawing and Writing
- On a surface, script the text or draw shapes through programming the robot arm.
- Precision control and trajectory planning ought to be investigated.
- Assembly Line Simulation
- An assembly line is required to be simulated for collecting the products in which several robot arms act together.
- Among diverse robot arms, we need to execute integration and coordination methods.
- Machine Learning for Robot Control
- To educate the robot arm for carrying out programs such as organizing objects or stacking blocks, make use of reinforcement learning.
- We have to try out various progress functions and machine learning algorithms.
- Teleoperation
- Acquire the benefit of VR controllers or a graphical interface to regulate the robot arm in a remote approach by creating an efficient system.
- Control mechanisms and real-time reviews are supposed to be applied.
- Sensor Integration
- With the robot arm simulation, it is significant to synthesize sensors such as LIDAR, force sensors and cameras.
- In order to improve the efficiency of robot arm like optimal object manipulation and recognition, deploy sensor data.
- Human-Robot Interaction
- Events in which the robot arm communicates with humans like team exercises or transmitting objects ought to be simulated.
- Ergonomic design variables and security principles are required to be examined.
- Quality Control and Inspection
- Specifically for faults, deploy vision sensors to examine the objects by programming the robotic arm.
- Considering the fabricating simulation, focus on executing automated quality control verification.
- 3D Printing Simulation
- As a 3D printer, the working principle of the robotic arm ought to be simulated.
- Regarding the extruder, path planning must be examined for precision control and additive fabrication.
- Simulation of Surgical Robots
- For a robotic arm which is deployed in keyhole surgeries, we need to design a simulation.
- As regards sensitive procedures, it is crucial to examine control mechanisms, accuracy and security.
- Robotic Bartender
- A simulation should be developed in which the robot arm is capable of mixing and serving drinks in an appropriate manner.
- Sequencing of tasks and liquid handling must be applied here.
- Warehouse Automation
- Warehouse platforms in which a robotic arm manages stock control like sorting or selecting packages are meant to be simulated.
- It is approachable to synthesize with other automated systems such as AGVs (Automated Guided Vehicles).
- Home Assistance Robot
- A robotic arm which carries out cleaning, helping old aged people and cooking needs to be simulated.
- Pay attention to security characteristics and simple, accessible interfaces.
Innovative Projects
- Adaptive Control Systems
- For adapting to diverse ecological scenarios and different loads, emphasize on accessing the robot arm by creating adaptive control algorithms.
- PID controllers and various modern control tactics are meant to be executed.
- Simulated Environment Interactions
- An extensive platform in which the robotic arm simulates practical science and communicates with different objects should be developed.
- To improve practicality, we can make use of PyBullet’s advanced simulation capabilities.
- Collaborative Robots (Cobots)
- In which several robots are working together on complicated tasks that demand authentic communication and integration, we have to simulate these events.
- Acquire the benefit of synchronization protocols and multi-agent systems.
- Robot Arm with Soft Gripper
- As a means to manage weak objects, a robot arm which is furnished with a soft gripper ought to be modeled and simulated.
- Gripping methods and significant features of materials have to be examined.
- Energy-Efficient Motion Planning
- While conducting specific tasks, we must reduce the energy usage of a robotic arm through creating effective algorithms.
- Joint control and energy-effective path planning methods should be utilized.
- Robotic Surgery Training Simulator
- For educating the robotic arm to conduct complicated operations like functioning as an efficient training tool for medical experts, an extensive surgical simulator is meant to be designed.
- It is advisable to concentrate on precise management and haptic response.
- Adaptive Learning in Dynamic Environments
- Regarding the dynamic variations in the platforms like diverse task demands or moving barriers, robot arm should be informed and adapted by programming them.
- Consider using the methods of adaptive algorithms and reinforcement learning.
- Space Robotics Simulation
- Especially for space missions like carrying out servicing the spacecraft or collecting structures in robots, a specifically modeled robotic arm has to be simulated.
- We have to concentrate on remote function and zero-gravity dynamics.
- Robotic Arm for Agriculture
- Simulations in which the robot is utilized for performing agricultural tasks like harvesting crops, planting and pruning are meant to be designed effectively.
- Considering the accurate manipulation and plant recognition, focus on synthesizing vision systems.
- Integration with ROS (Robot Operating System)
- For communication efficiency and enhanced control, robot arm simulation is required to synthesized with ROS>
- As regards task implementation, sensor synthesization and motion planning ROS nodes must be created.
If you are seeking guidance in developing a simple robot arm simulator using PyBullet, consider this article where we offer crucial step-by-step measures and multiple project ideas along with sample codes.
Subscribe Our Youtube Channel
You can Watch all Subjects Matlab & Simulink latest Innovative Project Results

Our services
We want to support Uncompromise Matlab service for all your Requirements Our Reseachers and Technical team keep update the technology for all subjects ,We assure We Meet out Your Needs.
Our Services
- Matlab Research Paper Help
- Matlab assignment help
- Matlab Project Help
- Matlab Homework Help
- Simulink assignment help
- Simulink Project Help
- Simulink Homework Help
- Matlab Research Paper Help
- NS3 Research Paper Help
- Omnet++ Research Paper Help
Our Benefits
- Customised Matlab Assignments
- Global Assignment Knowledge
- Best Assignment Writers
- Certified Matlab Trainers
- Experienced Matlab Developers
- Over 400k+ Satisfied Students
- Ontime support
- Best Price Guarantee
- Plagiarism Free Work
- Correct Citations
Expert Matlab services just 1-click

Delivery Materials
Unlimited support we offer you
For better understanding purpose we provide following Materials for all Kind of Research & Assignment & Homework service.
 Programs
Programs Designs
Designs Simulations
Simulations Results
Results Graphs
Graphs Result snapshot
Result snapshot Video Tutorial
Video Tutorial Instructions Profile
Instructions Profile  Sofware Install Guide
Sofware Install Guide Execution Guidance
Execution Guidance  Explanations
Explanations Implement Plan
Implement Plan
Matlab Projects
Matlab projects innovators has laid our steps in all dimension related to math works.Our concern support matlab projects for more than 10 years.Many Research scholars are benefited by our matlab projects service.We are trusted institution who supplies matlab projects for many universities and colleges.
Reasons to choose Matlab Projects .org???
Our Service are widely utilized by Research centers.More than 5000+ Projects & Thesis has been provided by us to Students & Research Scholars. All current mathworks software versions are being updated by us.
Our concern has provided the required solution for all the above mention technical problems required by clients with best Customer Support.
- Novel Idea
- Ontime Delivery
- Best Prices
- Unique Work
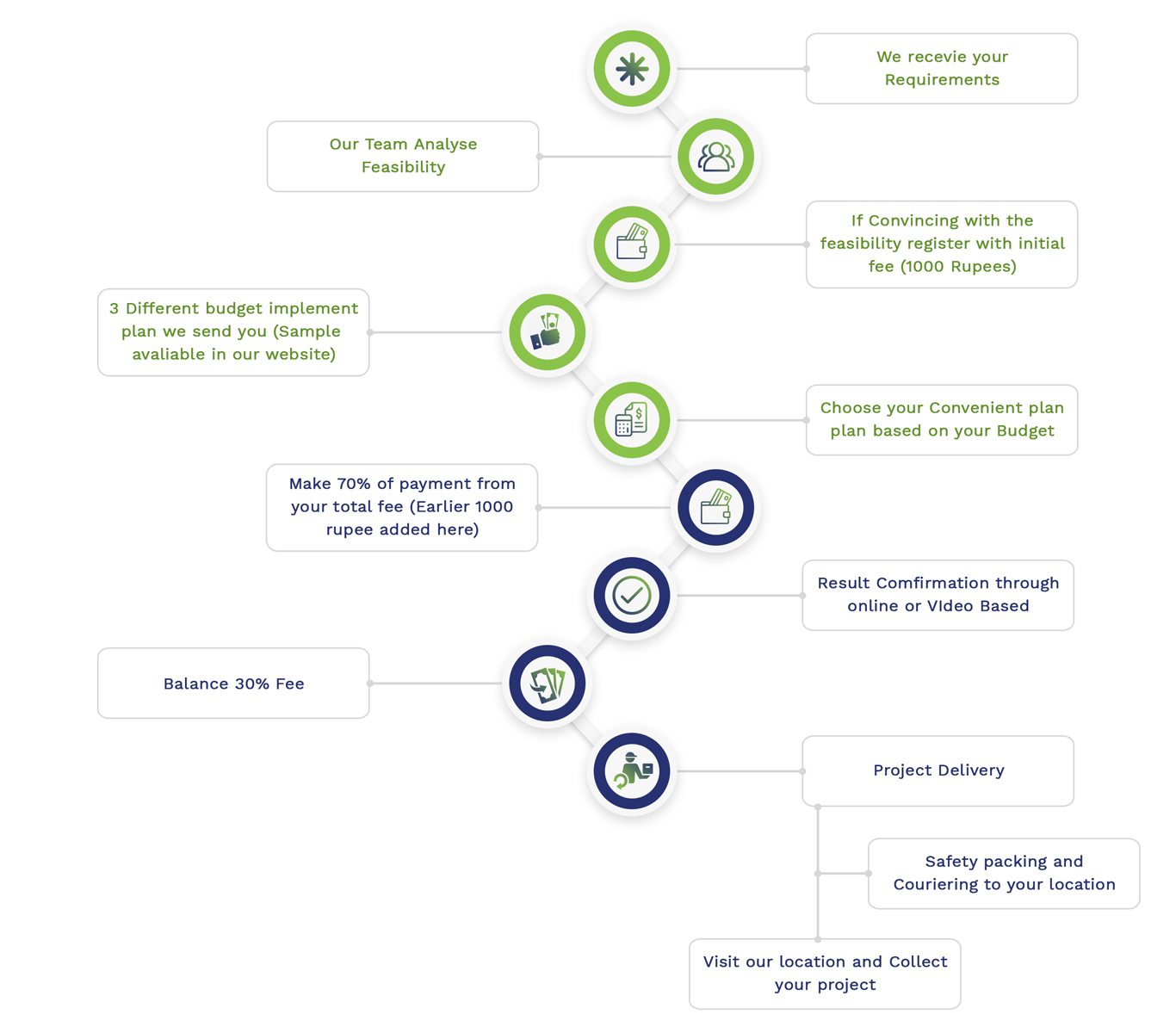
Simulation Projects Workflow
Embedded Projects Workflow